PHIL bandbreedte en stabiliteit
Het bepalen van de bandbreedte van de versterker is een niet te onderschatten factor in het bepalen van de totale PHIL-systeemkosten. In feite kunnen de totale systeemkosten verdubbelen als er hoogfrequente versterkers nodig zijn in vergelijking met een normale laagfrequente versterker.
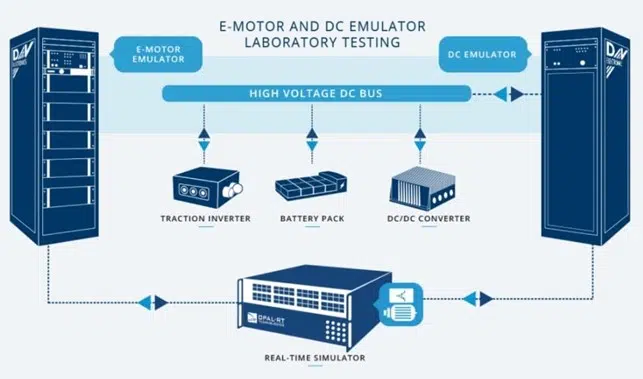
Motoren emuleren
Voorbeeld: we willen een motor simuleren om de thermische capaciteit van een omvormer ontwerp te testen. Hiervoor volstaat het om een eenvoudig motormodel te emuleren dat in staat is om de RMS-waarde van de motorstroom onder verschillende omstandigheden zoals de stabiele toestand en overbelasting te reproduceren. Een laagfrequente versterker die spanningen en stromen kan opwekken bij de fundamentele frequentie die op de motorklemmen wordt verwacht, is voldoende.
Aan de andere kant vereist de analyse in welke mate de inverter controller de koppelrimpel kan onderdrukken een nauwkeurige simulatie met hoogfrequente harmonische, die 5 kHz of meer kunnen bereiken, afhankelijk van de motor rotatiesnelheid en het aantal polen. Dergelijke high-end PHIL-motor emulatoren vereisen een versterker met hoge bandbreedte die wordt bestuurd door een snelle real-time simulator die een gedetailleerd model kan maken.
Een simulatietijd rond 1 of 2 microseconden en een versterker met een bandbreedte van 5 kHz tot 10 kHz zal nodig zijn om de harmonische stroom- en koppelrimpels te simuleren .Het opstarten van de motor genereert ook korte stroompieken aan de omvormer welke moeten worden gedetecteerd door het beveiligingscircuit. Het testen van een dergelijke hogesnelheidsbeveiliging gaat ook de reactietijd en bandbreedte bepalen die de versterker nodig heeft. In de praktijk hebben we voor het realiseren van real-time high-end motormodellen een stabiele versterker nodig die overweg kan met stroompieken en over een hoge bandbreedte beschikt om harmonische vervorming te kunnen simuleren.
Elektriciteitsnetwerken emuleren
Dezelfde analyse moet ook worden uitgevoerd om een distributie- en micro grid PHIL-simulator te implementeren. Bijvoorbeeld voor het testen van een trage micro grid controller met een updatetijd van 50 tot 100 milliseconden zijn eindversterkers nodig die de nominale netfrequentie 50hz kan genereren om vermogensschommelingen na te bootsen. Een eenvoudige simulator en een versterker met niet al te hoge bandbreedte kan voldoende zijn. Maar voor het simuleren van zeer snelle overspanning- en overstroompieken veroorzaakt door schakelende vermogenselektronica hebben we versterkers nodig met een hogere bandbreedte die in real-time wordt aangestuurd door een snelle simulator.

Een stabiele en accurate versterker selecteren
Het is ook van vitaal belang dat de stabiliteit van het gesloten lus systeem gevormd door de versterker, de belasting, de real-time simulator, alle sensoren en communicatieverbindingen te analyseren. Het doel hiervan is om een stabiel PHIL systeem te verkrijgen, rekening houdende met alle mogelijke vertragingen. Nauwkeurigheid, stabiliteit en een algehele veilige werking van het PHIL-systeem zijn prioriteit. In feite is het afstemmen van een PHIL-systeem hetzelfde als het optimaliseren van een besturingssysteem waar een stabiel draaiend geheel absolute prioriteit krijgt. Problemen moeten zorgvuldig worden geanalyseerd en alle vertragingen veroorzaakt door de real-time simulator, de versterkers en interface-apparaten moeten tot een minimum worden beperkt om de nauwkeurigheid en stabiliteit te verhogen van high-end PHIL-systemen. Versterkers met een bandbreedte van +/-10 kHz en op FPGA gebaseerde snelle simulatoren van minder dan een microseconde zijn dan vaak vereist.
De maximale bandbreedte van een PHIL-toepassing is gelijk aan de maximaal vereiste frequentiemogelijkheden om de gespecificeerde transiënten en harmonische tijdens de test te kunnen simuleren.

De onderstaande specificaties zijn erg belangrijk om de nauwkeurigheid, snelheid en stabiliteit van het PHIL-systeem te bepalen.
- Bandbreedte bepalen door bodediagrammen met de versterking en fase in functie van frequentie bij verschillende vermogens en type belastingen
- Maximale slew-rate en initiële vertraging
- Communicatievertragingen van en naar de DUT, uitgevoerd door de real-time simulator
- Inductantie en impedantie
- Sensornauwkeurigheid en vertraging
- Anti-aliasing filters (bijvoorbeeld als de DUT een omvormer is)
Ga terug naar het overzicht